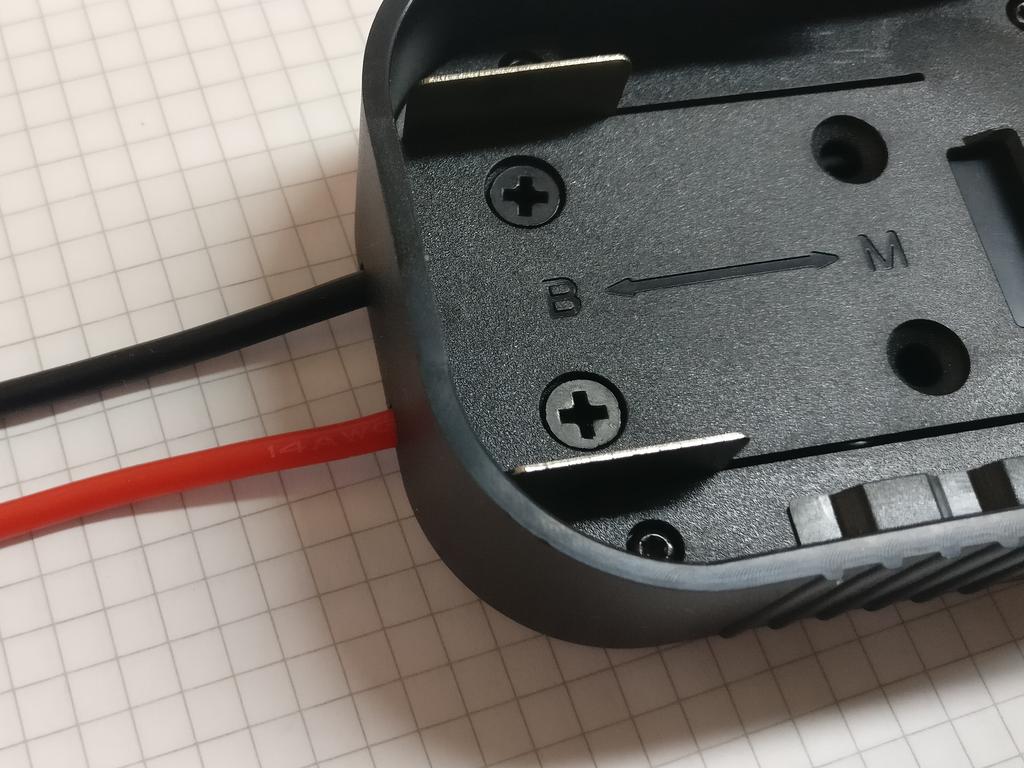
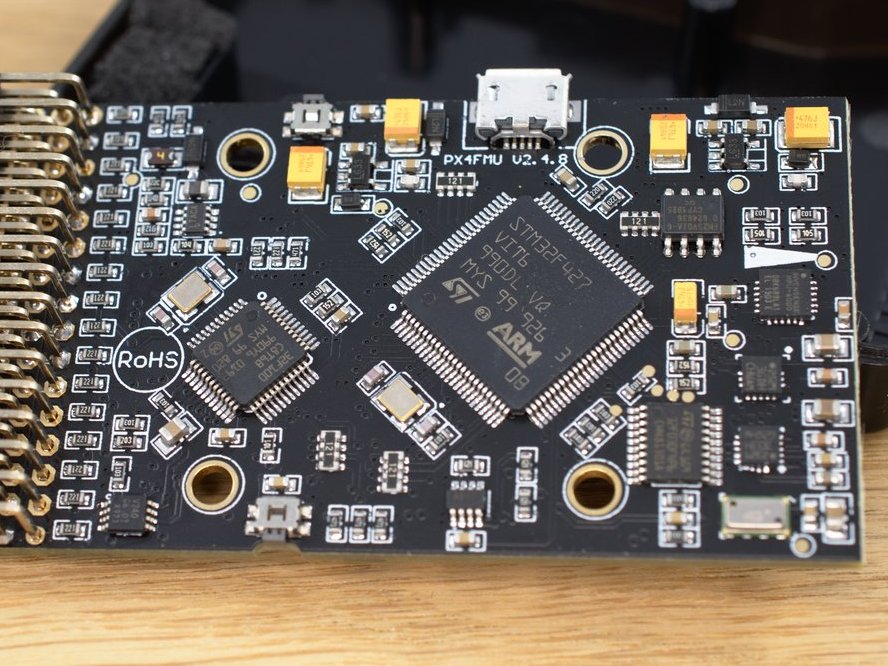
Many devices use USB to serial bridge ICs like the FT232, CH340 or CP2102. Not only micro-controller developer boards like the Arduino, but 3D printers or RC remotes and some flight controllers as well. Some µCs have even integrated USB interfaces and don’t need these chips at all. All these devices use a serial interface…
Creating Named Devices Using udev
Posted on