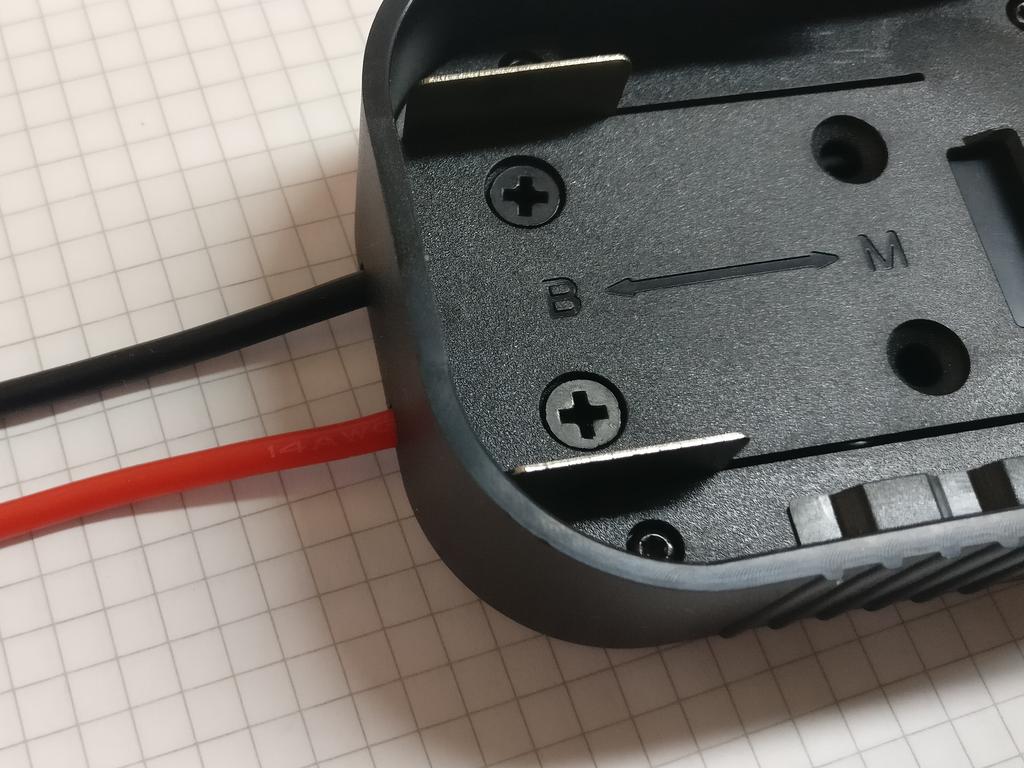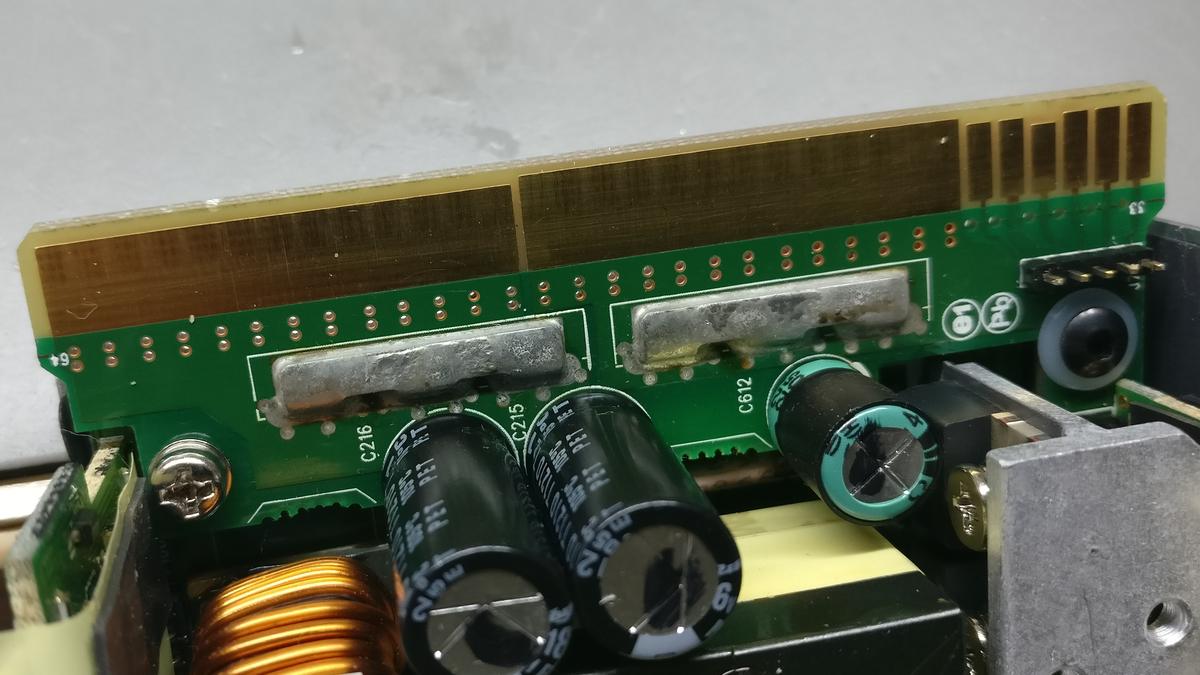
There are many tutorials and how-tos on the web, that use a resistor or wire to connect two pads on the top of the rear edge, to turn on the power supply. I found this a little bit odd, since regularly, one needs to pull a certain pin to ground (GND), to turn on the…
Turning on a HP DPS-750RB server power supply
Posted on